The Hidden Technology Powering Modern Robots
Robotics has become one of the most exciting and transformative fields in technology. From autonomous vehicles and warehouse automation systems to robotic surgeons and planetary exploration rovers, intelligent machines are reshaping industries and redefining what automation can accomplish. Behind many of these remarkable innovations lies a software framework that has quietly become the backbone of modern robotics development: the Robot Operating System, better known as ROS. For newcomers to robotics, ROS often appears in tutorials, research papers, job descriptions, university courses, and industry discussions. It has become such an important part of robotics that many professionals consider it a fundamental skill for anyone entering the field. Yet despite its popularity, many beginners are unsure what ROS actually is or why it matters so much. The answer is simple. Building robots is incredibly complicated. A single robot may contain cameras, lidar sensors, motors, robotic arms, navigation systems, artificial intelligence software, communication networks, and dozens of other interconnected technologies. Coordinating all these components can be a massive challenge. ROS was created to solve that problem. It provides a standardized framework that allows robotic components to communicate, share information, and work together efficiently. Instead of forcing developers to build everything from scratch, ROS provides tools, libraries, and infrastructure that dramatically simplify robotics development. Understanding ROS is one of the most important steps toward understanding modern robotics itself. This guide explores what ROS is, how it works, why it became so influential, and why it remains one of the most important technologies in robotics today.
A: ROS is a robotics software framework that helps robot programs communicate, share data, and work together.
A: It saves development time, supports reusable tools, improves debugging, and helps teams build complex robots more efficiently.
A: Not exactly. ROS is middleware and a tool ecosystem that runs on top of an operating system.
A: A node is a small program that performs one robot task, such as reading a sensor or controlling movement.
A: A topic is a communication channel where nodes publish and subscribe to messages.
A: ROS 2 is the newer version of ROS designed for modern robotics, production systems, security, and scalability.
A: No. Simulation tools can teach many ROS concepts before physical hardware is needed.
A: Python is beginner-friendly, while C++ is important for faster, performance-focused robot software.
A: Mobile robots, robot arms, drones, autonomous vehicles, research robots, warehouse robots, and educational robots can all use ROS.
A: ROS teaches the software structure behind real robotics systems and gives you practical tools to build them.
What Is ROS?
ROS stands for Robot Operating System, although the name can be somewhat misleading. ROS is not an operating system in the traditional sense like Windows, macOS, or Linux. Instead, it is an open-source middleware framework specifically designed for robotics development.
Think of ROS as a software layer that sits on top of a conventional operating system. Its purpose is to help different parts of a robotic system communicate and cooperate effectively.
A modern robot consists of many independent components. Cameras capture images. Sensors gather environmental data. Navigation systems calculate routes. Motors control movement. Artificial intelligence algorithms interpret information and make decisions. Each of these components must exchange information constantly.
Without ROS, developers would need to build custom communication systems and integration tools for every robotic project. ROS eliminates much of this complexity by providing standardized methods for communication, coordination, testing, visualization, and software management.
In essence, ROS acts as the central nervous system of a robotic application, enabling all components to function together as a cohesive whole.
The Origins of ROS
The story of ROS began in 2007 as part of a robotics research effort at Stanford University.
Researchers recognized that robotics development was highly fragmented. Different laboratories and organizations were creating their own communication systems, software architectures, and development tools. This lack of standardization slowed innovation and made collaboration difficult.
The goal was to create a flexible framework that researchers could share and build upon collectively.
The project soon gained momentum with support from Willow Garage, a robotics research organization dedicated to advancing open-source robotics software. Willow Garage invested heavily in ROS development and promoted its adoption throughout the robotics community.
As universities, researchers, startups, and technology companies embraced ROS, the ecosystem expanded rapidly. Thousands of developers contributed software packages, hardware drivers, navigation systems, simulation environments, and other tools.
Today, ROS has become the most widely used robotics framework in the world and has played a central role in accelerating robotics innovation.
Why Robotics Development Is So Complex
To understand why ROS is important, it helps to appreciate the complexity of robotics itself.
Robots must interact with the physical world, which introduces challenges far beyond those encountered in traditional software development.
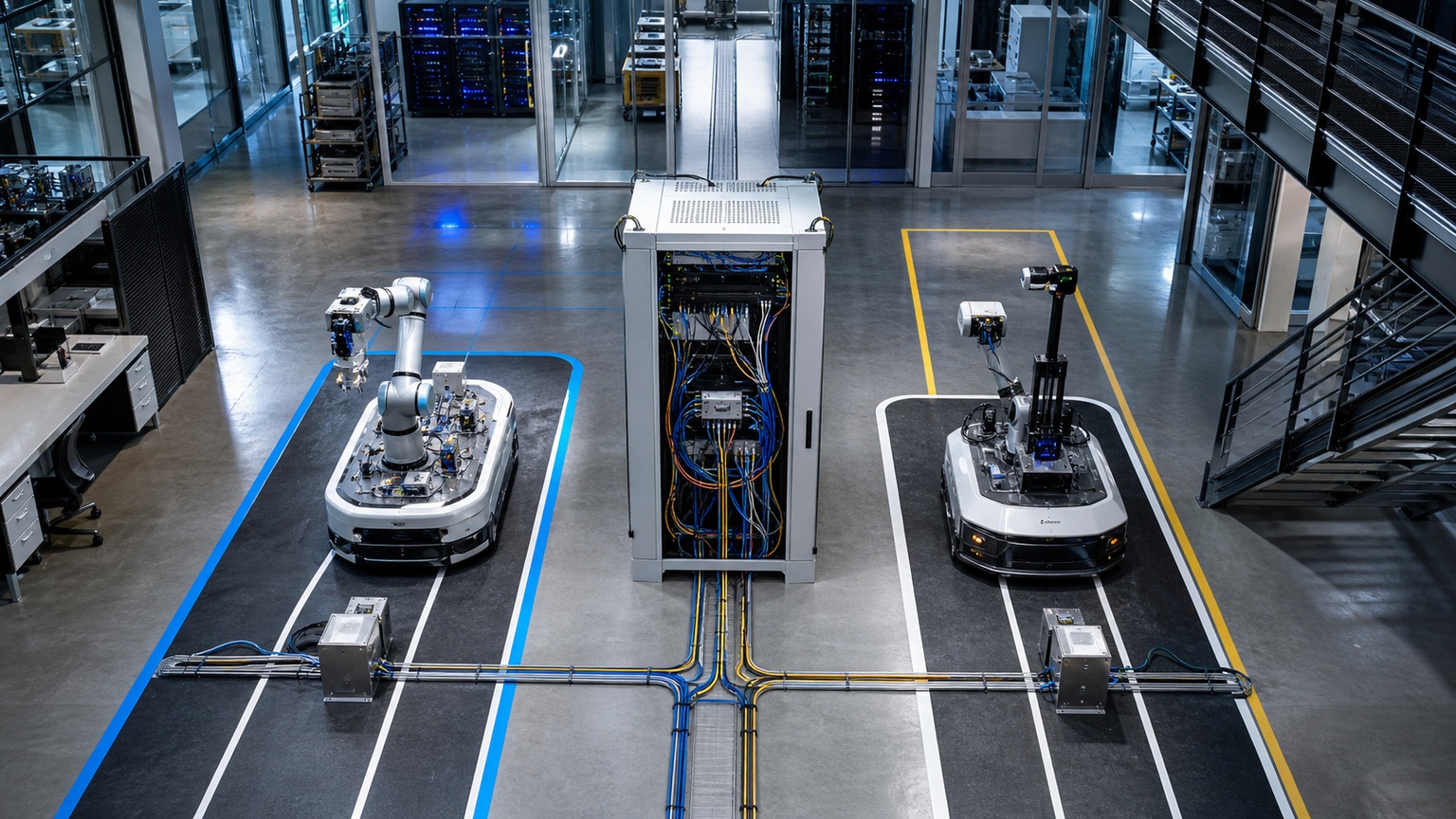
Consider an autonomous mobile robot operating inside a warehouse. It must collect information from cameras and sensors, identify obstacles, determine its location, create maps, plan routes, avoid collisions, monitor battery levels, communicate with other systems, and control motors precisely.
Each of these functions involves specialized software components that must operate together seamlessly.
Without a common framework, developers would spend enormous amounts of time creating custom infrastructure simply to connect different subsystems. This would leave less time for innovation and problem-solving.
ROS addresses this challenge by providing a common language and architecture for robotics development.
The Core Philosophy Behind ROS
One of the key reasons for ROS’s success is its emphasis on modularity.
Rather than building one massive software application, ROS encourages developers to divide robotic systems into smaller, independent components called nodes.
Each node performs a specific task. One node may process camera data. Another may perform navigation calculations. A third may control motor movement. Additional nodes may monitor sensors, manage communication, or run artificial intelligence models.
These nodes communicate with one another while remaining independent.
This modular architecture makes robotic systems easier to build, maintain, debug, and expand. Developers can update or replace individual components without redesigning the entire system.
The flexibility provided by modularity has become one of ROS’s defining characteristics.
Understanding ROS Nodes
Nodes are the fundamental building blocks of ROS applications.
A node is simply a software process responsible for a particular function within a robotic system.
Imagine a self-driving robot navigating an office building. One node processes lidar data. Another tracks battery status. Another handles obstacle detection. A separate node calculates navigation paths. Yet another controls wheel movement.
Each node focuses on a specific responsibility.
This separation of concerns provides significant advantages. Developers can test nodes individually, distribute them across multiple computers, and reuse them across different projects.
The node-based architecture allows robotic systems to scale efficiently as complexity increases.
For beginners, understanding nodes is often the first major step toward mastering ROS.
Topics: How ROS Components Communicate
Communication is essential in robotics.
Nodes must continuously exchange information to coordinate behavior and respond to changing conditions.
ROS uses a communication mechanism called topics to facilitate this interaction.
A topic acts as a communication channel. One node publishes information to a topic, while other nodes subscribe to that topic and receive updates.
For example, a camera node may publish image data. An object detection node subscribes to the image topic and analyzes incoming frames. A navigation node may subscribe to object detection results and adjust movement accordingly.
This publish-subscribe architecture allows nodes to communicate efficiently without requiring direct connections to every other component.
Topics make ROS systems flexible, scalable, and easy to manage.
Services and Actions in ROS
While topics are ideal for continuous streams of information, some interactions require direct requests and responses.
ROS addresses this need through services.
A service allows one node to request information or trigger an operation while another node provides a response.
For example, a robot may ask another component to calculate a route or retrieve a specific piece of information.
Actions extend this concept further by supporting long-running tasks. Actions allow nodes to receive progress updates and final results while a task is being performed.
Together, topics, services, and actions provide a comprehensive communication framework capable of supporting a wide range of robotic applications.
ROS Packages and Software Reuse
One of ROS’s greatest strengths is its extensive ecosystem of reusable software.
ROS organizes functionality into packages. A package contains software, configuration files, documentation, launch files, and other resources related to a specific feature or capability.
Developers can create packages for navigation, sensor integration, robotic manipulation, computer vision, machine learning, mapping, localization, and countless other applications.
Thousands of ROS packages have been contributed by researchers and engineers worldwide.
This ecosystem allows developers to build upon existing work rather than reinventing common solutions. As a result, robotics development becomes faster, more efficient, and more collaborative.
Software reuse is one of the primary reasons ROS has accelerated innovation throughout the robotics industry.
Simulation and Virtual Testing
Testing robots in the real world can be expensive, time-consuming, and sometimes risky.
ROS addresses this challenge through powerful simulation capabilities.
Simulation allows developers to create virtual robots operating inside virtual environments. Engineers can test navigation algorithms, sensor processing systems, and autonomous behaviors without using physical hardware.
One of the most widely used simulation platforms associated with ROS is Gazebo. Gazebo provides realistic physics, environmental modeling, sensor simulation, and robotic interaction capabilities.
Simulation offers several benefits. It reduces development costs, accelerates testing, improves safety, and allows experimentation in environments that may be difficult or impossible to recreate physically.
For beginners, simulation provides an excellent way to learn robotics concepts before investing in hardware.
ROS and Autonomous Navigation
One of the most popular applications of ROS involves autonomous navigation.
Navigation requires robots to understand their environment, determine their location, create maps, plan routes, and avoid obstacles.
ROS provides tools and frameworks that simplify many of these tasks. Developers can integrate lidar sensors, cameras, GPS receivers, and inertial measurement units while leveraging proven navigation algorithms.
ROS navigation systems support warehouses, hospitals, offices, factories, agricultural environments, and outdoor autonomous vehicles.
Many of today’s autonomous mobile robots rely heavily on ROS-based navigation frameworks.
This capability has made ROS particularly valuable in industries focused on automation and logistics.
ROS and Computer Vision
Modern robots often depend on computer vision to understand the world around them.
Computer vision allows robots to recognize objects, interpret scenes, track movement, and make intelligent decisions based on visual information.
ROS integrates seamlessly with popular computer vision libraries such as OpenCV. Developers can create vision-based applications that process images, analyze video streams, detect objects, and perform machine learning inference.
Applications include autonomous vehicles, industrial inspection systems, agricultural robots, medical devices, security systems, and robotic assistants.
The combination of ROS and computer vision has become one of the most powerful forces driving robotics innovation.
Why Companies Use ROS
ROS is not limited to academic research.
Many companies use ROS during product development, prototyping, testing, and even commercial deployment. Startups often choose ROS because it reduces development time and allows teams to focus on solving unique business challenges.
Large organizations benefit from ROS’s flexibility, extensive ecosystem, and strong community support.
ROS is used in autonomous vehicles, warehouse automation, manufacturing robotics, service robots, agricultural technology, healthcare systems, aerospace applications, and countless other industries.
Its widespread adoption has made ROS experience a valuable skill in the job market.
For many employers, familiarity with ROS signals practical robotics knowledge and technical competence.
ROS and Robotics Education
ROS has become the standard educational platform for robotics instruction worldwide.
Universities use ROS to teach robotics principles, software development, autonomous navigation, computer vision, and artificial intelligence. Students gain hands-on experience with technologies used throughout the industry.
Educational institutions appreciate ROS because it provides real-world relevance while remaining accessible and cost-effective.
Students who learn ROS often transition more easily into robotics careers because they already understand industry-standard tools and workflows.
For aspiring robotics professionals, learning ROS can provide a significant competitive advantage.
The Rise of ROS 2
As robotics technology evolved, developers recognized limitations in the original ROS architecture.
The growing importance of cybersecurity, real-time performance, distributed systems, and large-scale deployments created new requirements that ROS was not originally designed to address.
This led to the development of ROS 2.
ROS 2 builds upon the success of ROS while introducing major improvements in reliability, security, scalability, communication architecture, and platform support.
Many organizations are now transitioning toward ROS 2 for future projects.
While ROS remains influential, ROS 2 represents the future direction of robotics software development.
Why Learning ROS Still Matters
Some beginners wonder whether learning ROS remains worthwhile given the rise of ROS 2.
The answer is absolutely yes.
Many core concepts introduced by ROS remain central to ROS 2. Understanding nodes, topics, services, packages, and modular robotics architecture provides a strong foundation for future learning.
ROS also continues to support countless existing projects and educational programs.
For anyone interested in robotics, ROS remains one of the most valuable technologies to learn because it teaches principles that extend across the entire robotics ecosystem.
Conclusion
ROS has become one of the most important technologies in modern robotics because it solves one of the industry’s greatest challenges: complexity. By providing a standardized framework for communication, coordination, simulation, software reuse, and development, ROS allows engineers and researchers to build sophisticated robotic systems more efficiently than ever before.
Its modular architecture, extensive ecosystem, powerful tools, and vibrant community have helped accelerate innovation across industries ranging from manufacturing and logistics to healthcare and autonomous transportation. ROS has empowered developers to focus on solving robotics problems rather than reinventing software infrastructure.
For beginners, learning ROS opens the door to understanding how modern robots operate and how advanced robotic systems are built. Whether your goal is to become a robotics engineer, artificial intelligence specialist, researcher, or entrepreneur, ROS provides a foundation that can support your growth throughout your robotics journey.
As robots continue transforming the world, ROS remains one of the key technologies enabling that transformation. Understanding what ROS is and why it matters is not just important for robotics professionals—it is essential for anyone interested in the future of intelligent machines.